Il robot MecWilly
La Scuola per inventori MecWilly prende il nome dal robot umanoide che ho costruito nel 2010 con materiali economici e di recupero.

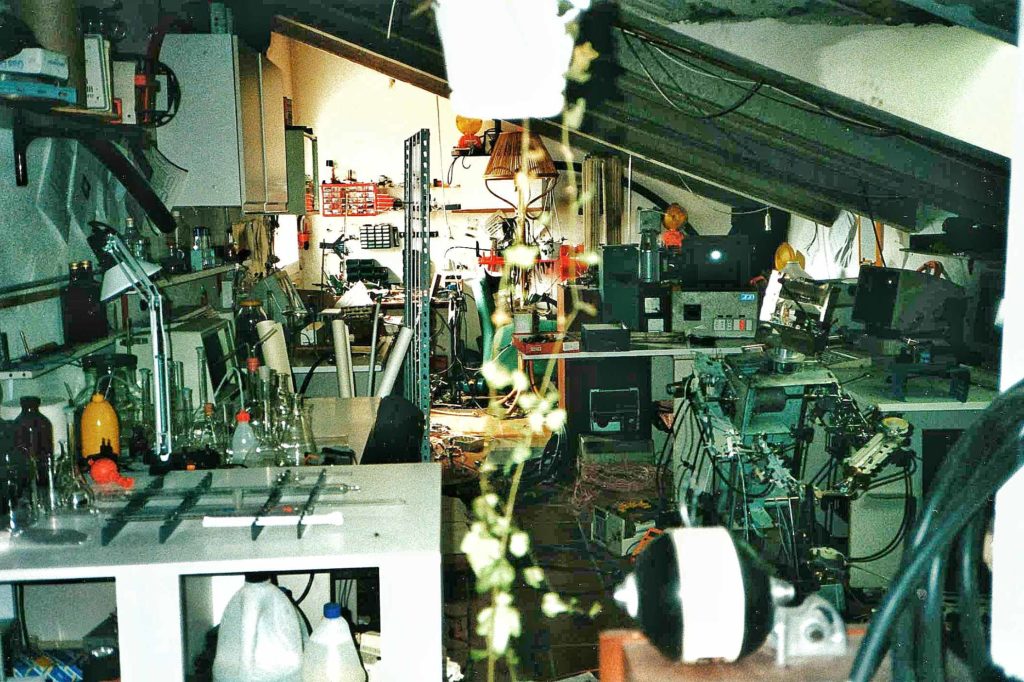
Gli antenati del robot MecWilly
Alcuni dei miei tentativi di costruire un robot umanoide. Almeno di quelli di cui ho le foto, spesso li modificavo o smontavo prima di riuscire a scattarle.
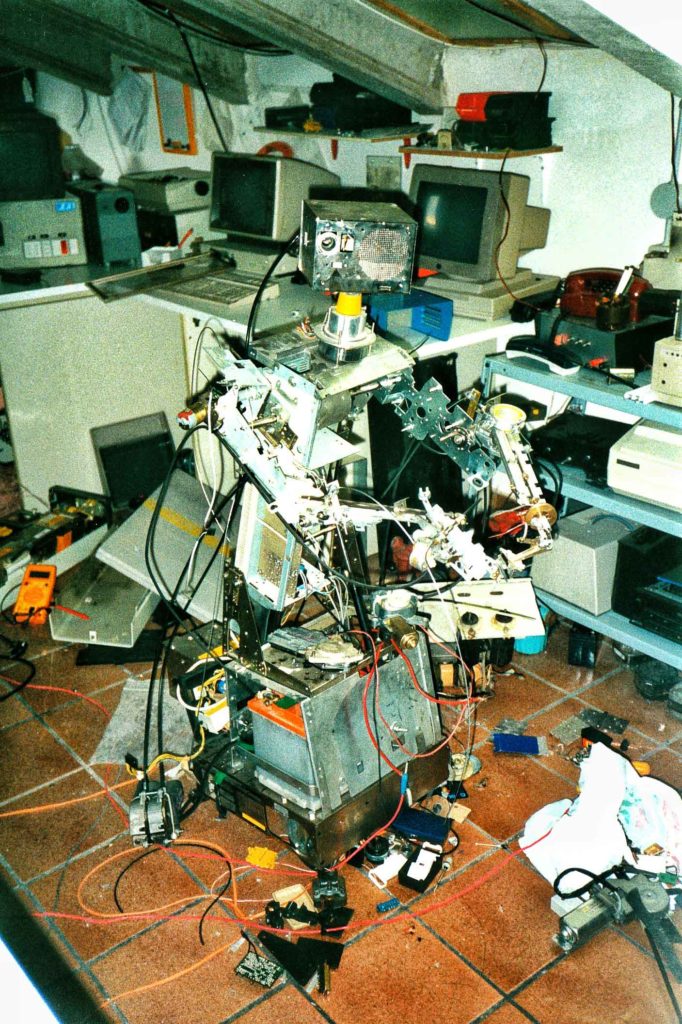
1998
Un antenato di MecWilly costruito con le parti metalliche di vecchi computer degli anni 80, allora i computer erano molto massicci. La testa era costruita con un alimentatore, la base conteneva la batteria di un’automobile ed era formata dalla carcassa metallica di un vecchio monitor. Il corpo era un case metallico di un grande computer tagliato a metà.
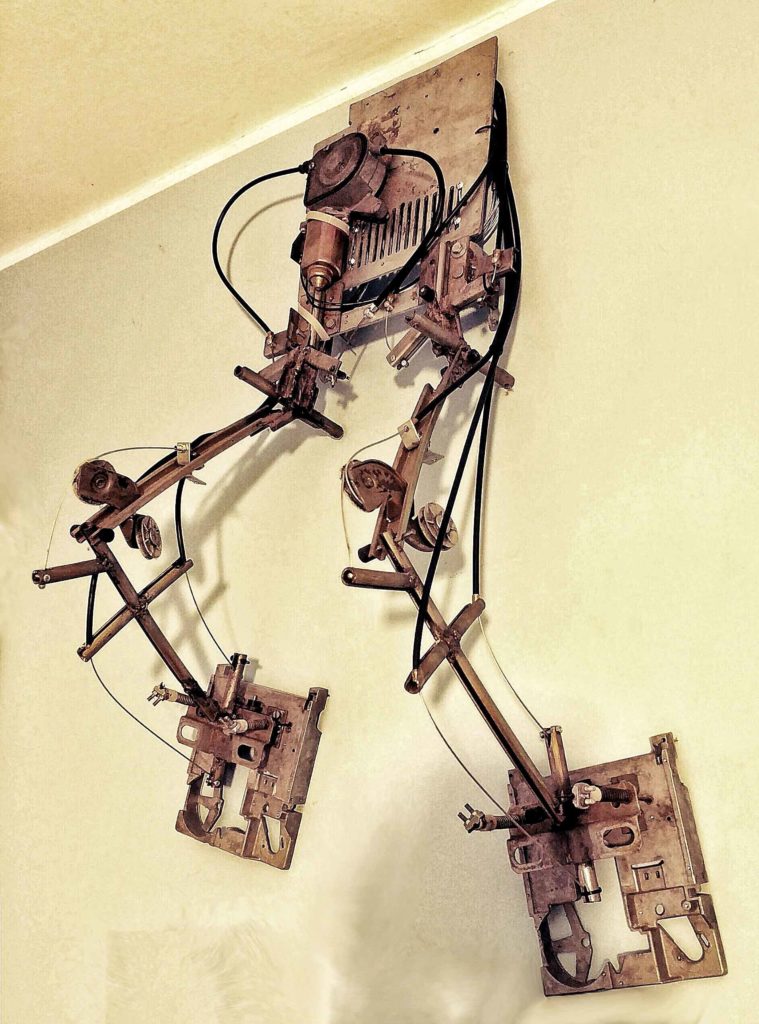
1999
Questo robot aveva le gambe in ferro che si muovevano grazie ai motori a spazzole dei finestrini delle automobili. Questi ultimi erano posizionati nel busto e agivano tramite dei cavi d’acciaio. In questo modo il robot poteva disporre di gambe molto sottili. Il legno del busto era un pezzo del vecchio letto del babbo di quando era bambino.

Un pezzo di quello che rimane oggi di questo robot che avevo costruito ispirandomi al film ‘Terminator‘.
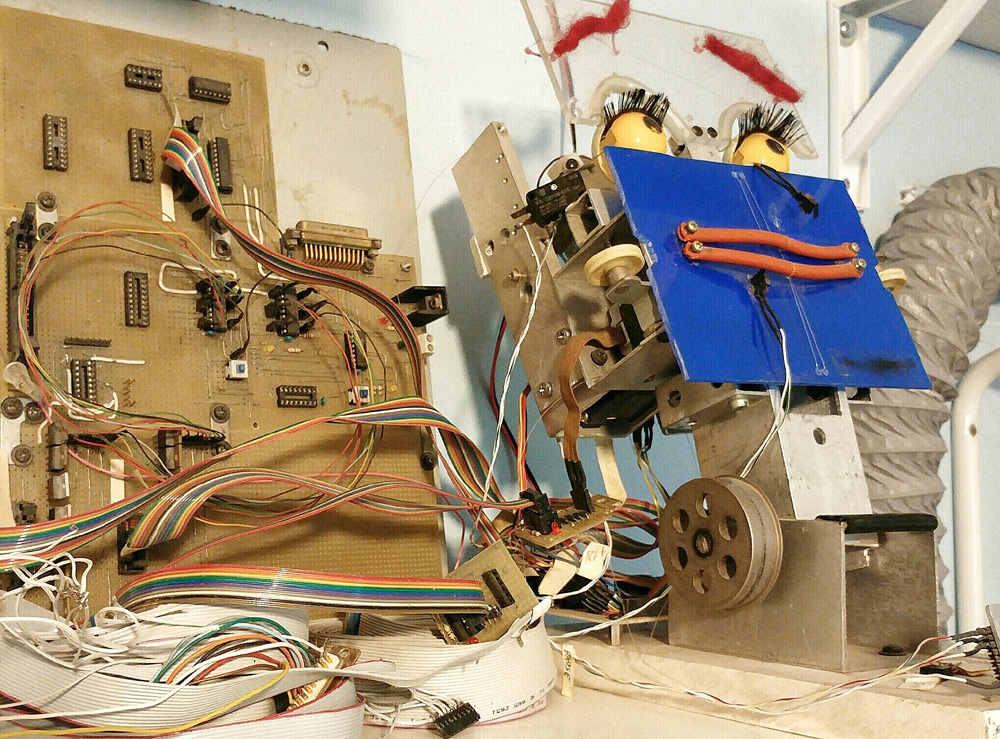
Jeremy 14 (2000)
Jeremy 14 era un volto che poteva comunicare degli stati d’animo. Il numero 14 derivava dal fatto che fosse il quattordicesimo robot costruito fino ad allora. Era controllato da un computer tramite una scheda di interfaccia parallela costruita a mano sulla millefori visibile in foto. Aveva dei motori passo-passo che muovevano labbra, palpebre e sopracciglia.
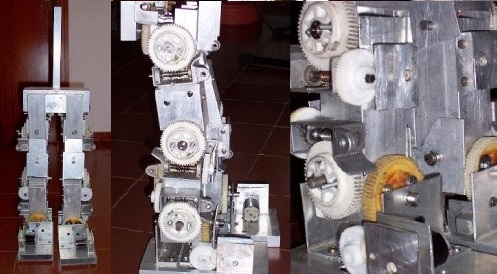
2003
Gambe robot in alluminio azionate da motorini di un vecchio distributore di merendine. I riduttori li avevo realizzati mischiando alcuni ingranaggi dei dei motori dei finestrini e altri del distributore di merendine. L’intera lavorazione dell’alluminio l’ho effettuata con la sega, lima e trapano, una bella fatica.
C900 (2005)
Era un robot pubblicitario, lo si poteva guidare senza fili e vedere attraverso la sua telecamera. La parte nera poteva ospitare i manifesti.

Junior (2005)
Questo robot era alto 85 cm e riusciva a camminare in tutte le direzioni e quasi a correre in avanti. Anche questa struttura in alluminio era realizzata tutta a mano.

Junior versione compatta (2005)
Questo era un prototipo di gambe molto corte con grossi motori e tutte le articolazioni principali. Il risultato è una sorta di robot molto compatto.
Video: Junior versione compatta

Junior Mini (2005)
Questo era un piccolo prototipo con poche articolazioni.
VERO (2006)
L’umanoide VERO era un robot bambino che tramite i suoi 10 motori disposti nelle gambe riusciva a camminare. Indossava comuni abiti da bambino. Da lontano volevo farlo sembrare un bambino vero.

2008
Una versione precedente di MecWilly, ancora non si chiamava così. Aveva il viso in alluminio e delle grandi ruote.

Quasi MecWilly (2008-2009)
Questo volto era il primo che avevo chiamato MecWilly. Il robot era posizionato su un mobiletto che conteneva il computer. Nell’immagine a destra era vestito da direttore d’orchestra, l’avevo programmato per dirigere mio cugino mentre suonava il violino.
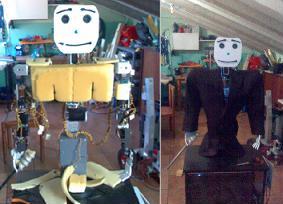
Qui sotto aveva nuovamente le ruote, ero finalmente riuscito a contenere l’ingombro del computer.
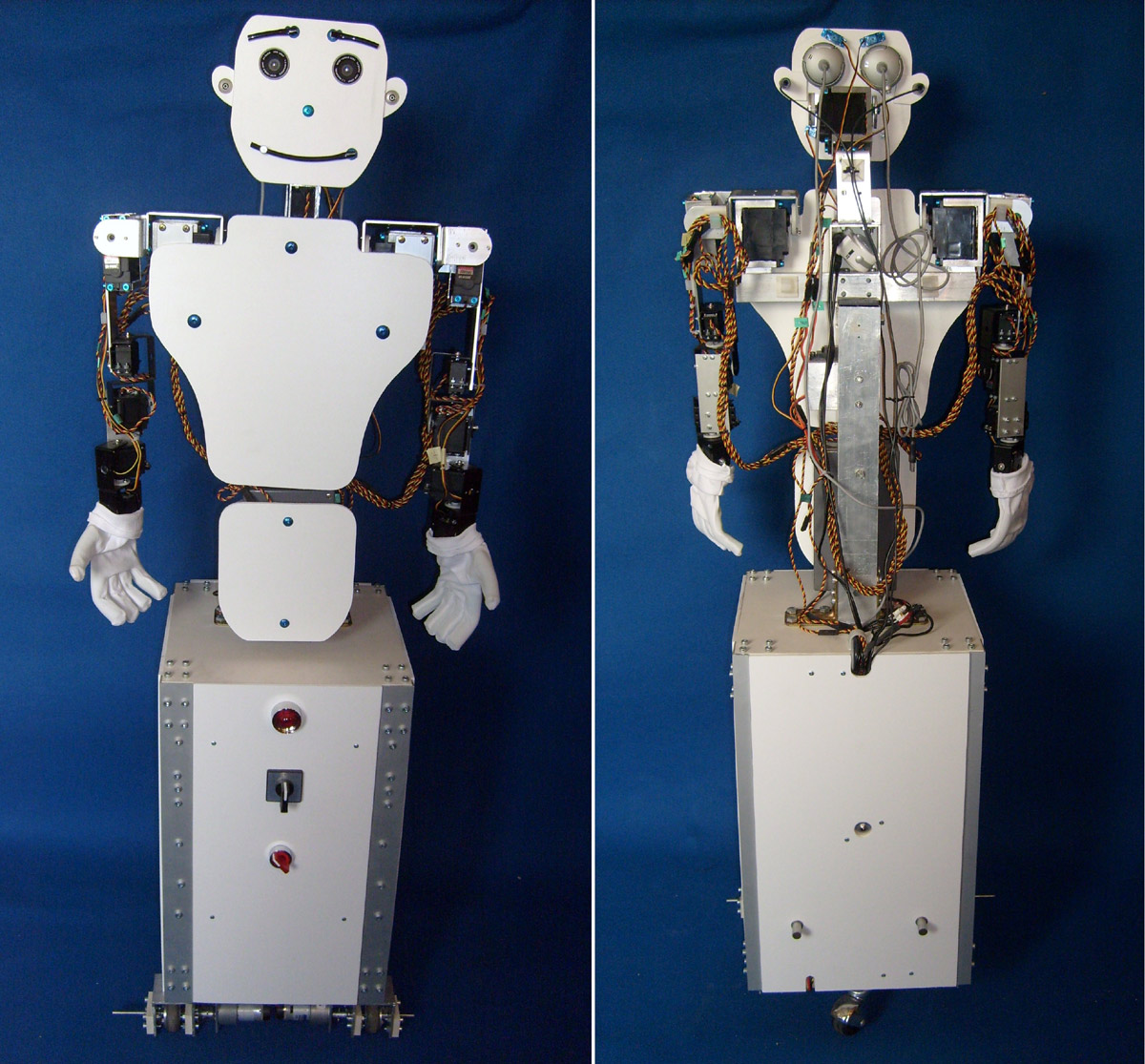
MecWilly (2010)
Ecco MecWilly, alto 1 metro e 20 cm, realizzato con materiali economici e di recupero tramite il solo utilizzo di utensili a mano come sega, martello e lima. E’ in grado di riconoscere le persone, seguirle con lo sguardo, capire se gli si sta sorridendo, concentrare l’attenzione su particolari zone. Nel 2013 l’ho evoluto e può dialogare liberamente con le persone su argomenti generici o specifici senza necessità di training vocale da parte del parlatore.
MecWilly Junior (2010)
MecWilly Junior era una variante di MecWilly con monitor LCD. Progettato appositamente per l’educazione aveva le dimensioni di un bambino di 4 anni. Poteva mostrare immagini, video, parole direttamente dalla faccia. Era dotato di telecamera e microfono, il software era stato scritto appositamente per interagire con i bambini. Poteva muovere le braccia e afferrare oggetti con le mani.
Video: MecWilly J. impara i colori del mondo

MecWilly Educational (2011)
MecWilly Educational è robot a basso costo progettato per interagire con i bambini in diversi contesti educativi. E’ uno strumento educativo flessibile che si adatta alle idee dell’insegnante e del ricercatore.

MecWilly Abete (2016)
MecWilly Abete è robot umanoide da costruire, è composto da materiali semplici ed ecologici, stimola il pensiero creativo e incoraggia l’utilizzo di oggetti di uso comune per realizzare i propri sogni creativi. E’ un progetto che coinvolge robotica, informatica, elettronica, manualità e tanta creatività. MecWilly Abete può essere programmato da educatori, insegnanti e bambini.

MecWilly Compact/Damerino (2017)
MecWilly Compact/Damerino è una faccia robotica educativa da costruire e programmare. Il principale utilizzo è quello di insegnare robotica e programmazione. Con MecWilly Compact è possibile creare delle vere e proprie conversazioni con un robot umanoide. E’ controllata da un dispositivo Android e si programma in modo semplice tramite un linguaggio di programmazione realizzato appositamente per questo robot.
